windows
web
codeforces
Markdown
绘图机器人
安全测试
智能家居
非线性方程求解
USB
AI绘画 神经网络
zookeeper
WT-VL53L0 L1
损失函数
网站安全防护
cannon
邮件营销
Junit使用的基本流程
数字电路
泰勒
断裂力学
车道线检测
2024/4/11 21:41:26
车道线检测-Eigenlanes 论文学习笔记
论文:《Eigenlanes: Data-Driven Lane Descriptors for Structurally Diverse Lanes》 代码:https://github.com/dongkwonjin/Eigenlanes 核心:在 Eigenlane Space 中检测车道线 创新点
Eigenlane:数据驱动的车道描述符ÿ…

基于ADAS的车道线检测算法matlab仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 图像预处理
4.2 车道线特征提取
4.3 车道线跟踪
5.完整工程文件 1.课题概述 基于ADAS的车道线检测算法,通过hough变换和边缘检测方法提取视频样板中的车道线,然后根据车道线的弯曲情况…

基于opencv传统数字图像处理实现车道线检测详细过程(附源码)
车道线检测 (Lane Detection)
1、实验内容
本实验使用数字图像处理的基本方法,构建了一个车道线检测模型。该模型可以识别图像中所有的车道线,并得到完整的车道线信息。模型在tuSimple Lane Dataset大小为100的数据子集进行了测…

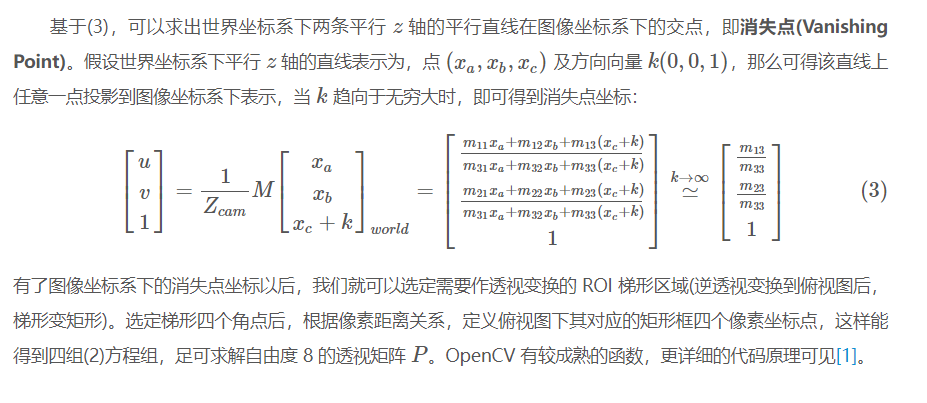
车道线检测中的IPM变换
车道线检测中的IPM变换
车道线检测(Lane Detection)是 ADAS 系统中重要的功能模块,而对于 L4 自动驾驶系统来说,在不完全依赖高精度地图的情况下,车道线检测结果也是车辆运动规划的重要输入信息。由于俯视图(BEV, Bird’s Eye View)下做车道…


车道线检测-PolyLaneNet 论文学习笔记
论文:《PolyLaneNet: Lane Estimation via Deep Polynomial Regression》代码:https://github.com/lucastabelini/PolyLaneNet地址:https://arxiv.org/pdf/2004.10924.pdf参考:https://blog.csdn.net/sinat_17456165/article/deta…

Hough变换原理学习
Hough变换原理 一、简单介绍 Hough变换是图像处理中从图像中识别几何形状的基本方法之一。Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中…
机器学习实践系列之11 - OpenCV实战车道线检测
ADAS 在经过资本的一轮热炒之后已经不新鲜了,Mobile Eye的技术积累和效果也让很多童鞋叹为观止,然后奋起直指! 初学者为代表的童鞋,二话不说,上来就是霍夫变换,还是直接用opencv里带的,入门很好…